
The MEMS sensor can measure at 8000 Hz, while the ToF only at 50Hz. Unfortunately the tolerance of the measurements are not that good. The measurement of a distance of 200mm are typically within +/-20mm, the speed within +/- 0.1 m/s and the acceleration typically within +/-0.2g.
However, the laws of physics when it comes to the relationship between displacement, speed and acceleration, are fairly good known. The laws describes a digital twin of the physical system which can be utilized by estimation techniques as e.g. a Kalmanfilter. By combining the Kalmanfilter, the measurements and a lot of experience with such systems, it seems feasible to achieve estimates of the damper positions within +/- 1mm. Simulations on a Spring-Damper model seems promising...
In the simulations, shown in Figure 1 and 2 below, it is assumed a car of 1480kg, mass/spring/damper system of 80kg and a suitable applied force. The damper/spring system is assumed KW V3 with spring constant of ~60N/mm. The damping constant is D=4Ns/mm for the close to critical damped system and D=1Ns/mm for the underdamped system.
The MEMS measurement is at 1000Hz and the ToF at 50Hz. The Kalmanfilter is implemented to deal with measurements of differet sampling frequencies.
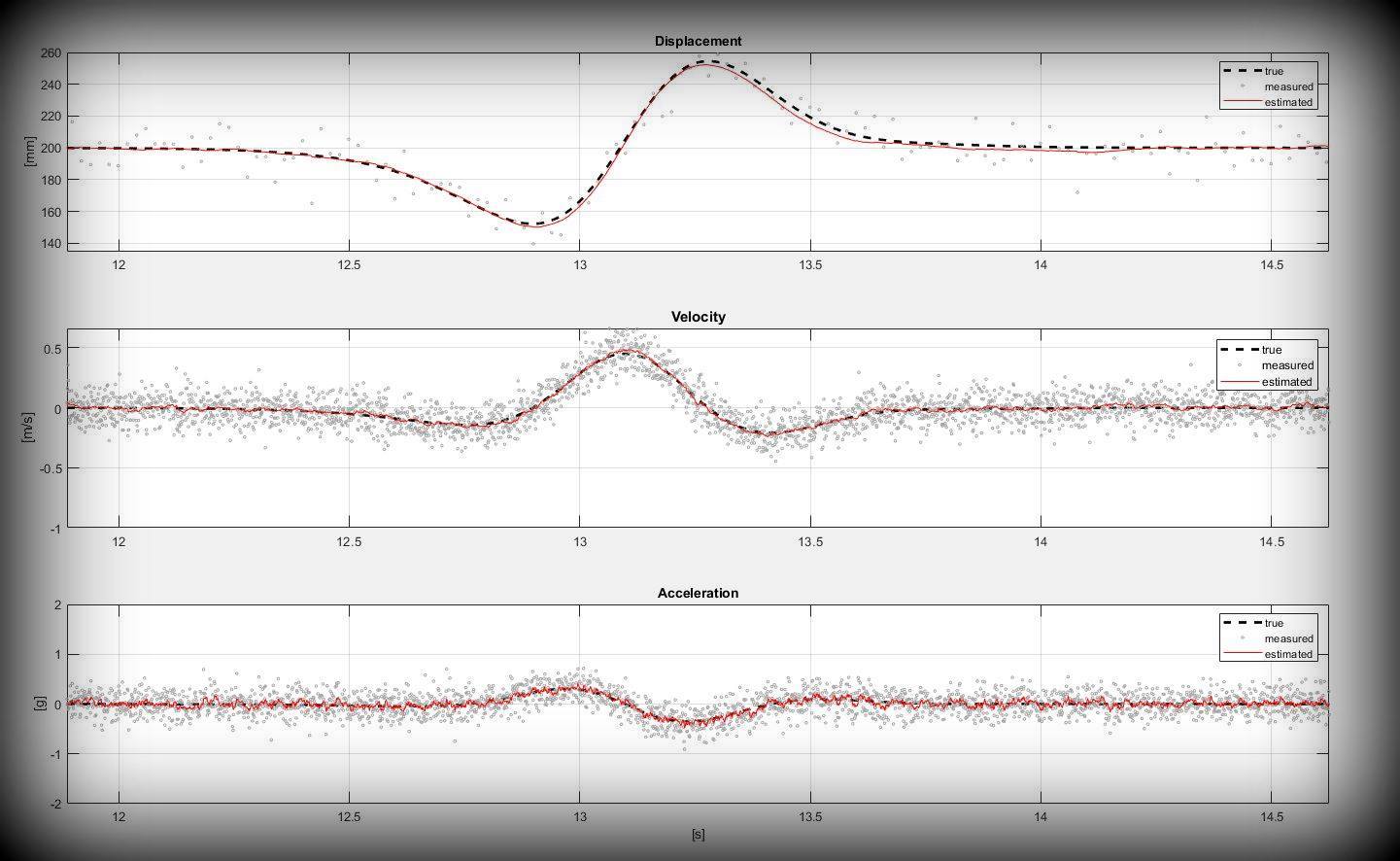
Figure 1: Critical damped system
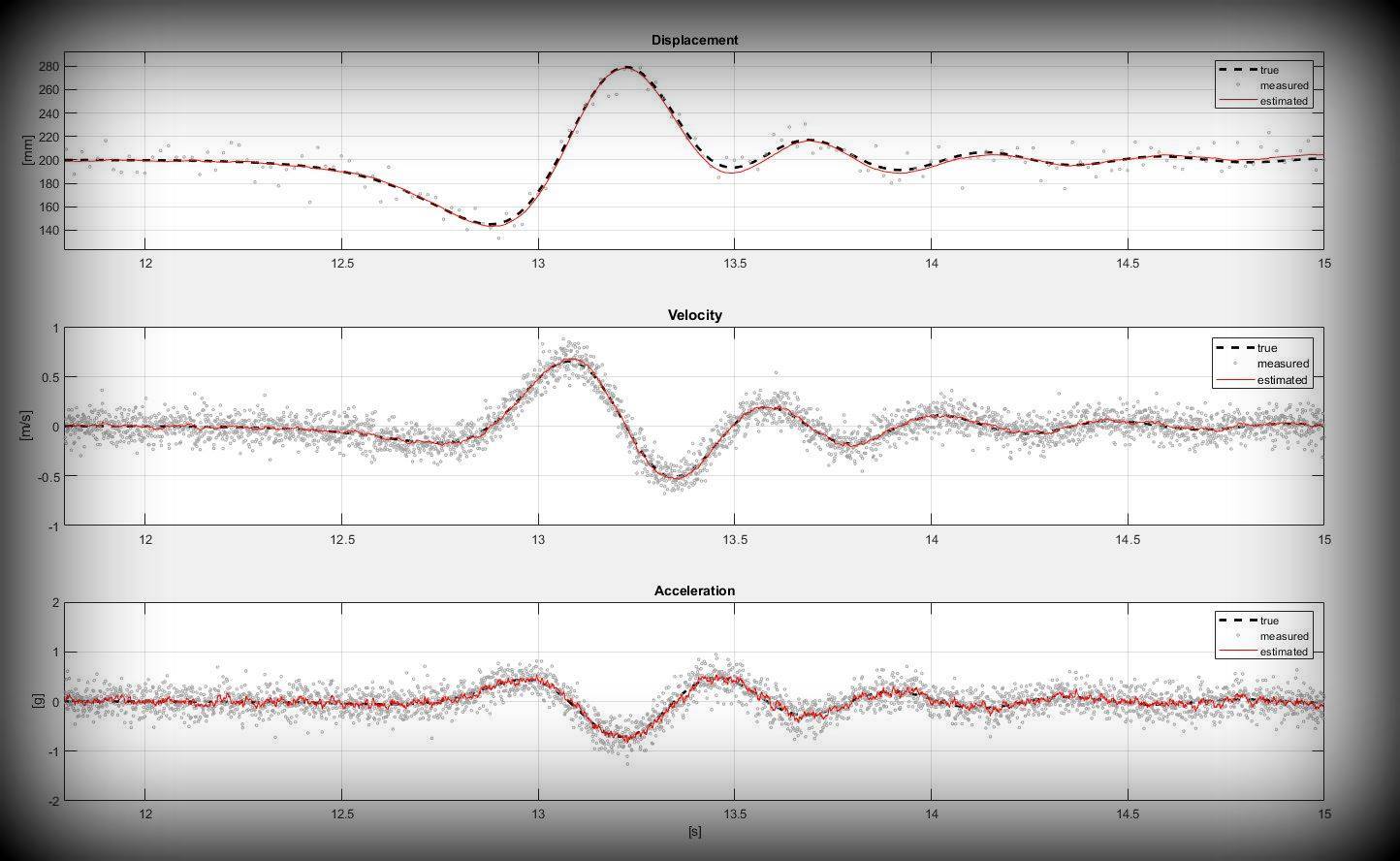
Figure 2: Underdamped system


